Мобільний додаток
Ще більше зручності! Миттєві сповіщення про всі актуальні події вашого профілю!


































Слава Українцям!
Добрий день шановна спільнота.
От, я не знаю, як всім вам, але, коли дивишся огляди від ведучих наших відомих авто-каналів, то здебільшого всі розказують про авто зовні, всередині та трохи про тек як воно їде, без занурення в системи безпеки, мультимедіа, а, головне, в системи допомоги водієві, а це, на мій погляд важливіше за інформацію про те, чим надихнувся дизайнер, коли малював зовнішнішність автомобіля😕
Отже, якби у мене був оператор, чи я мав би екшн-камеру, то це все можна було вкласти у 5хв відеоролік, але у мене цього всього немає, тож будуть слова та фотки….
Постараюся описати як працює Travel-assist - це поєднання адаптивного круїзу (ACC) та асистенту утримання в смузі (Lane Assist), активна система утримання автомобіля в смузі руху з напівавтоматичним контролем у випадку аварії та з асистентом руху в заторі, та що показує Head-up дисплей.
Почну з того, що, на мою думку, всі сучасні авто мають мати таку функцію за замовчуванням, бо це реально сучасні, корисні та передові системи допомоги водієві, які беруть частину навантаження від довгих подорожей на електронні системи автомобіля, також вони можуть взяти частину відповідальності у разі виникнення аварійної ситуації (перевірено на собі). Звісно, водій завжди буде відповідальним за все, але маючи доволі великі пробіги, я впевнено можу сказати, що маючи такі функції, втоми від довгих подорожей значно менше.
Працює система дуже і дуже класно, вона впевнено тримає полосу, автомобіль не рискає, при чому, навіть коли полоса вузька, вона все одно добре тримається і плавно повертає абсолютно автономно, так-так, саме повертає по дорозі, звісно розворот чи різкий поворот в автономному режимі вона не виконає, але 95% всіх плавних поворотів зробить. Коли немає розмітки, але є автомобіль попереду, то система зачепиться за нього і буде повторювати його траєкторію – але у разі, якщо таке відбувається слід проявляти більшу пильність і контролювати ситуацію самостійно.
Система впевнено працює, коли бачить обидва боки полоси, і, навіть, якщо розмітка ледве видна, то система все одно розпізнає її доволі добре, тому я впевнено ставлю оцінку «відмінно»! Саме її робота поставила остаточну крапку у виборі авто, бо я був приємно вражений, також був вражений системою напівавтоматичного контролю автомобілю, якщо водій перестає кермувати автомобілем – про це згодом напишу. Але я розумію, що це не автономний автопілот, це лише система допомоги водієві, для неї написані певні алгоритми роботи, і розраховувати на те, що все завжди буде так, як хоче водій глупо, тому основна задача водія зрозуміти алгоритми роботи системи і вдало ними користуватися, і, звісно, завжди розуміти, що водій швидше виконає маневр чи раніше задіє, наприклад, гальмо чи газ, але, якщо вивчити алгоритми та обмеження роботи систем, водити авто по трасі просто КАЙФ!
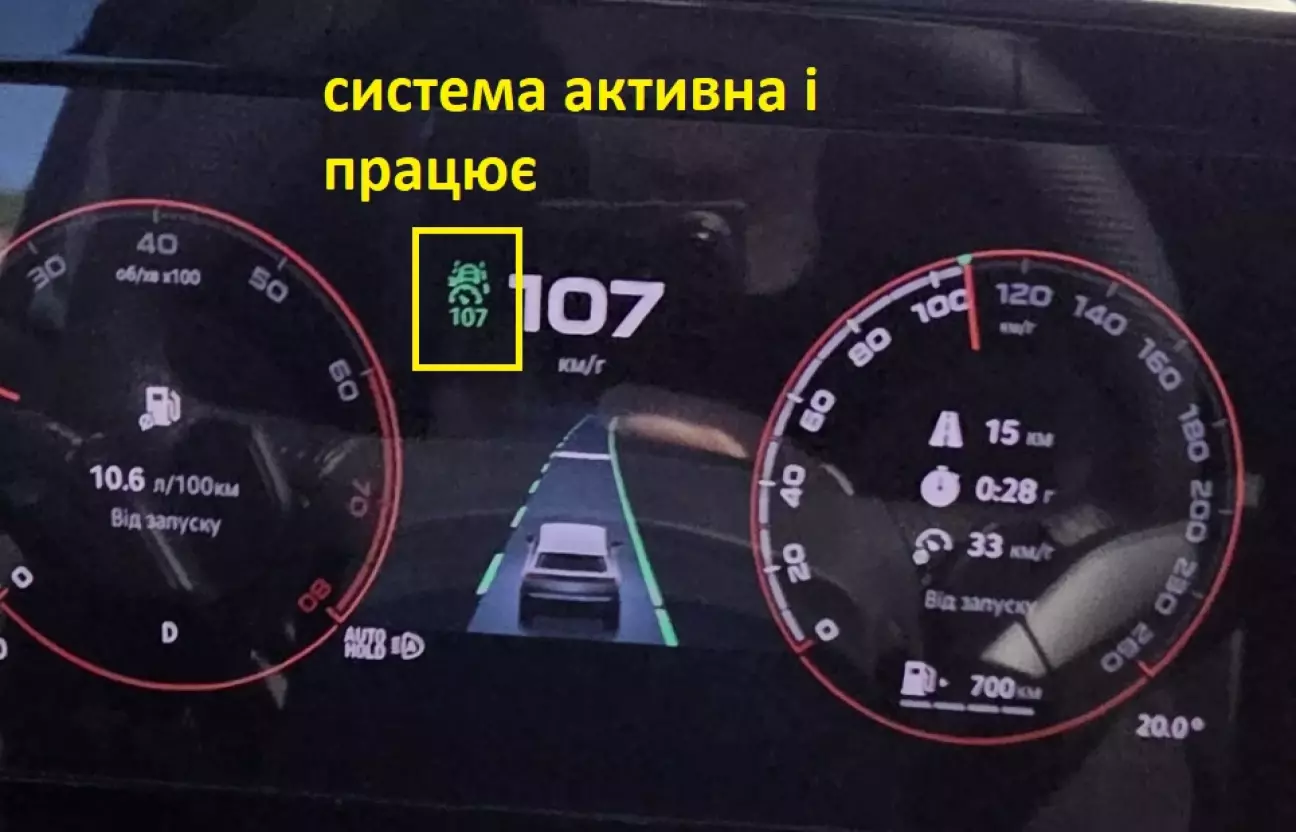
Head-up дисплей добре все відображає, він показує підказки навігації, швидкість і стан системи Travel-assist. Це моє перше авто з проекцією, і я не можу сказати, що без цього водити авто важче, але факт того, що очі переводити униз на панель приладів я став значно рідше присутній-100%. Зробити фотку дуже важко, бо навести фокус проблематично, але трохи буде.
Тепер трохи світлин. За якість прошу вибачення, бо все робилося за кермом, під час поїздки, тож у пріоритеті була безпека, а не якість кадрів.
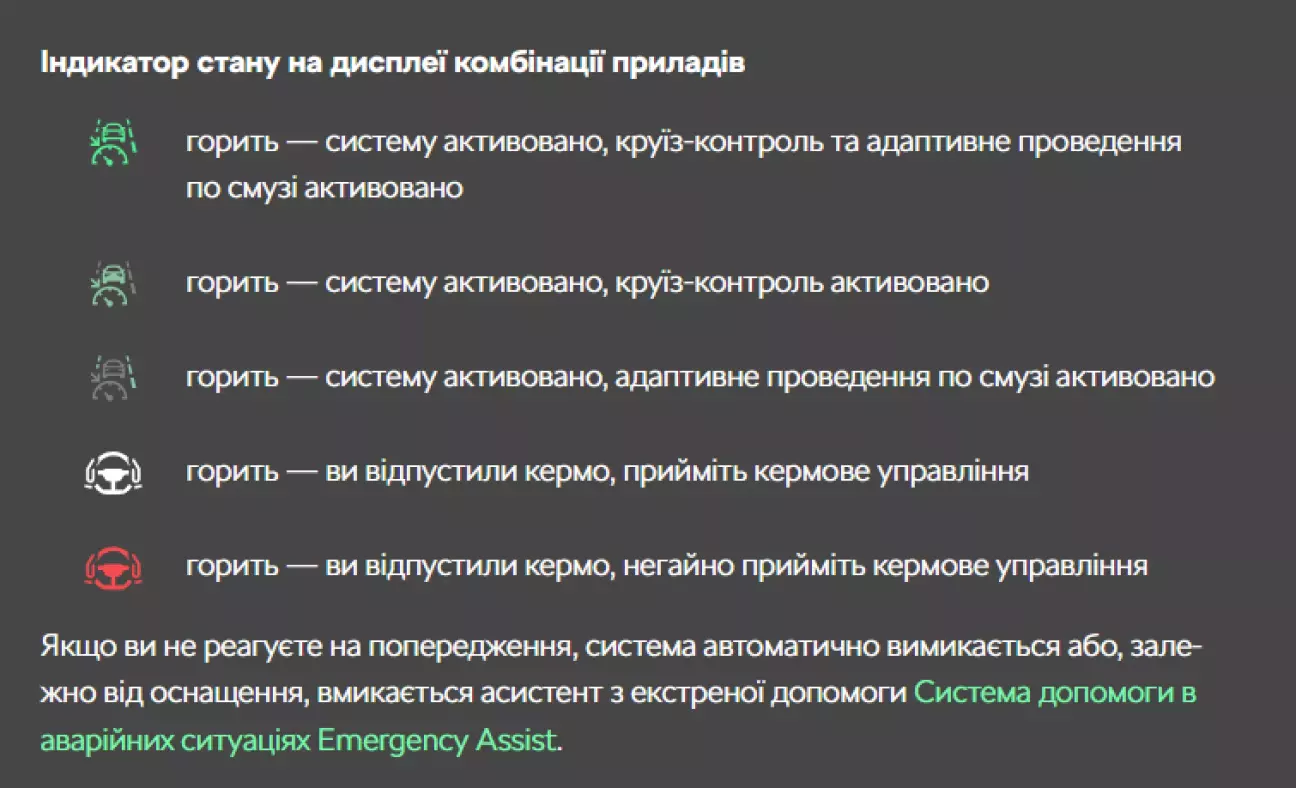
1. Коли системі все зрозуміло, і вона активно приймає участь у кермуванні, то все світиться зелененьким, а між розпізнаними полосами, дорога залита білим, то можна кайфанути, але все одно система слідкує чи руки на кермі, і якщо вона не буде відчувати опір від рук водія, то спочатку видасть піктограмку, а у разі відсутності реакції водія, почне більш активно просити водія взяти керування на себе і супроводить це нагадування звуковим сигналом, виведе червоне попередження проборку та HUD, але, якщо і це проігнорити, то будем потім дуже цікаво, про це окремо напишу.

2. Систама розпізнає полосу суцільну, узбіччя, полосу приривісту, бордюрний камінь, відбійники показує суцільною полосою, тобто, бачить все, що потрібно і змінює це все в реальному часі.
 Не розпізнає ні смугу не узбіччя
Не розпізнає ні смугу не узбіччя


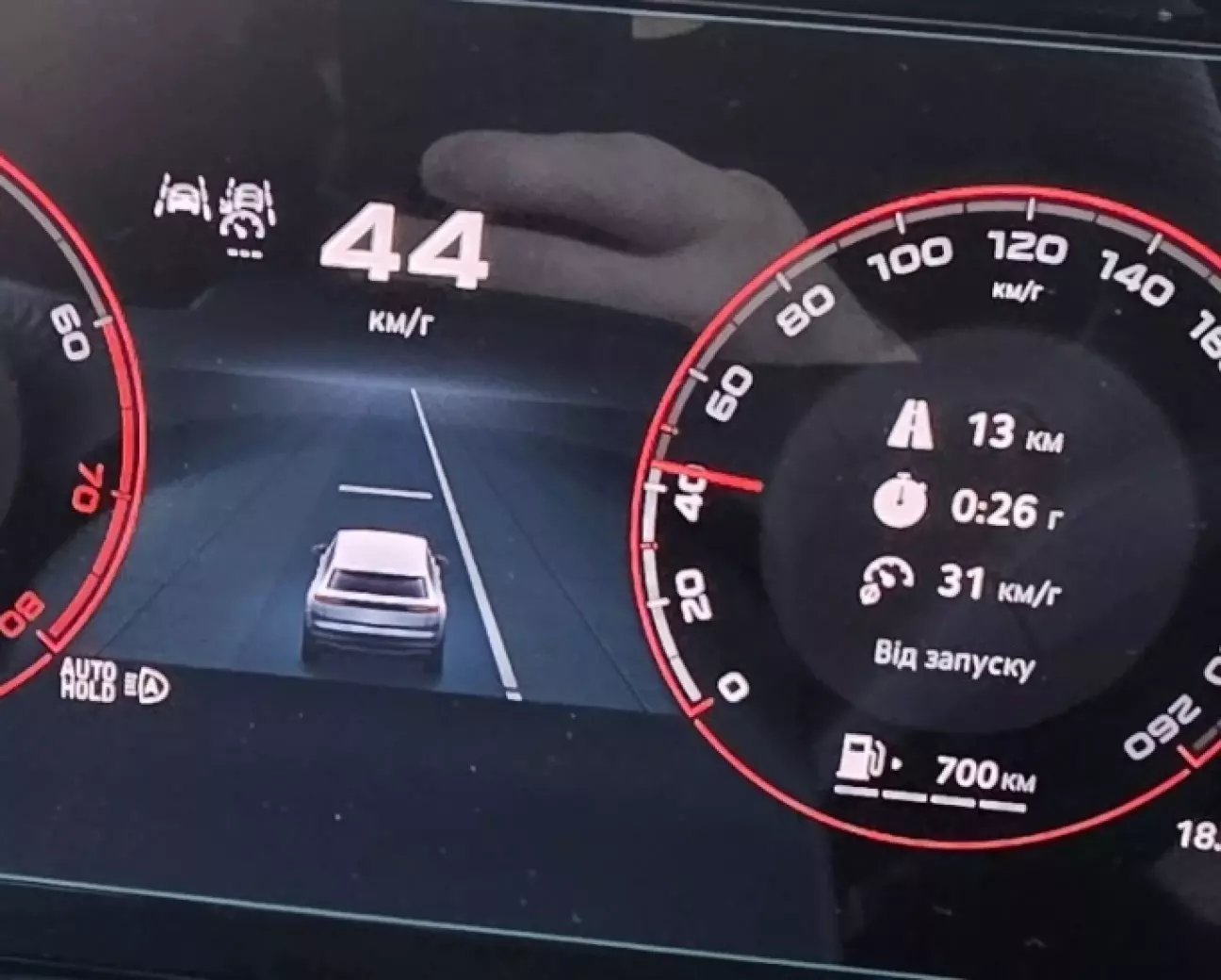 полоса вздовж узбіччя, розділової немає
полоса вздовж узбіччя, розділової немає

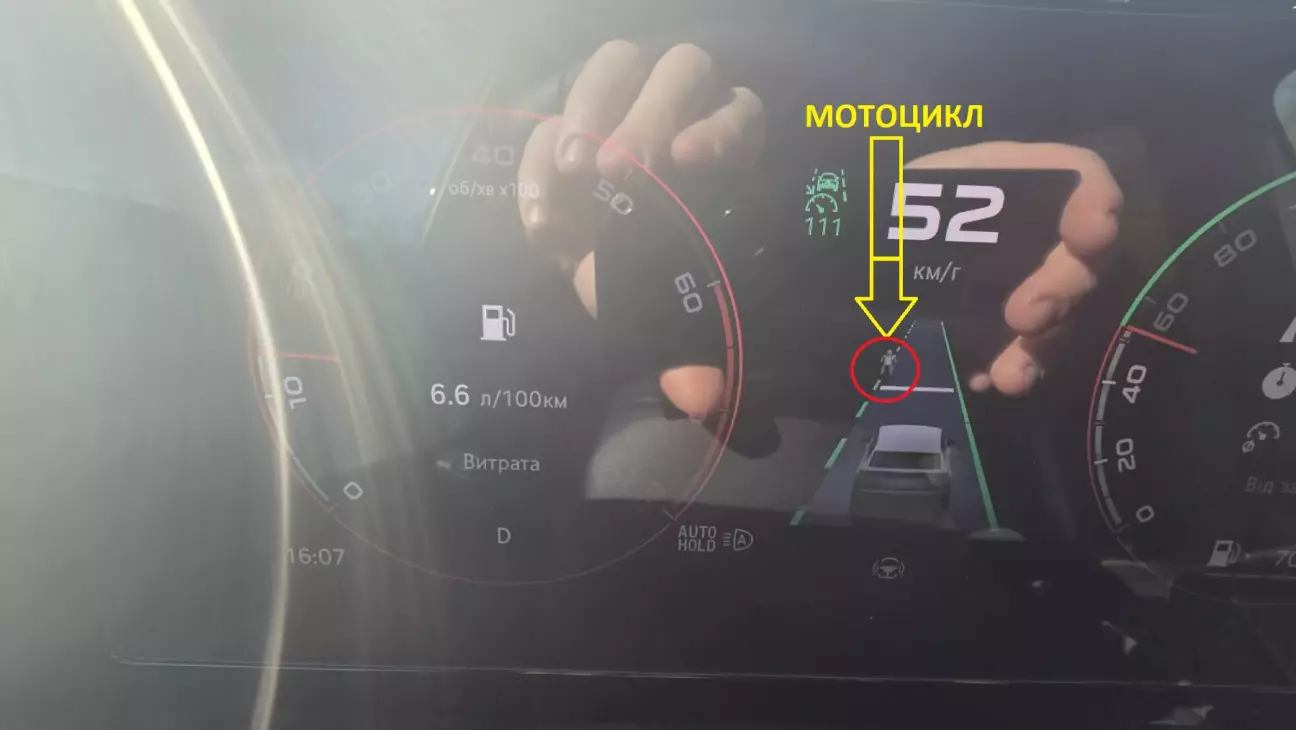
3. Система розпізнає тип ТЗ попереду (легкове авто, автобуси чи вантажівки, двоколісні ТЗ). Показує горизонтальну смужку налаштованої дистанції до виникнення перешкоди.
4. Система показує, якщо в полосу заїжджає авто, показує поворот, тобто активно моніторить стан попереду та навколо автомобіля.


5. В заторі при активованій системі машина повністю гальмує і сама починає рух, але у разі якщо зупинка не перевищує приблизно хвилину, потім для початку руху треба торкнутися педалі акселератору.
Пару "трюкових" фото, де була вузька полоса і я не тримав кермо на протязі всього затяжного повороту, все пройшло добре, живий здоровий, але руки буду тримати на кермі🤪
P.S.
Чому я свідомо робив акцент на ширину смуги, а тому що РАВ-4, де я вперше спробував аналогічну систему, добре тримав широку смугу, а на вузькій йому було не дуже комфортно - він рискав, але то було у далекому 2021 році, може там вже теж пофіксили...
Ну наче все, може комусь стане у нагоді мій допис.
Якщо є питання, то залюбки відповім.
Досліджую далі🧐...
Героям Слава!






А коли я їхав до Тернополя з Острога (а там "напрям") і їхав по де-завгодно (по центру, узбіччям, по зустрічній), то воно просто з розуму сходило, бо не могло зрозуміти як так можна їхати))) Якби в ньому була програма "шановний водій, вам потрібен маршрут до психлікарні чи до витверезника", то вона б запустилася)))
Ви ж теж могли її вимкнути....