Мобільний додаток
Ще більше зручності! Миттєві сповіщення про всі актуальні події вашого профілю!


З самого придбання машини в мене було бите лобове яке відразу на 0 ТО замінили і з лобовім "вийшло з чату" калібрування камери.
Тож утримання в полосі в мене не працювало всі ці роки. І от у одному з чатів мені нагадали про comma.ai і їх поточний стан розробки.
Я колись давно бачив їх ще коли вони намагались керувати пріусом з купою вебкамер прикручених ізострічкою і всю в проводах. а потім з телефона на лобовому. а тепер в них є "майже готове" рішення у вигляді повноцінного Linux компьютера з трьома камерами на борту і з системою проводки яка підключаеться в розрив штатної камери, розʼєм в розʼєм нічого не треба паяти, перехоплює сигнали керування штатної камери і "кермує" машиною!
Я дуже радий шо камера в мене не працювала, бо не купив би може тоді автопілот.
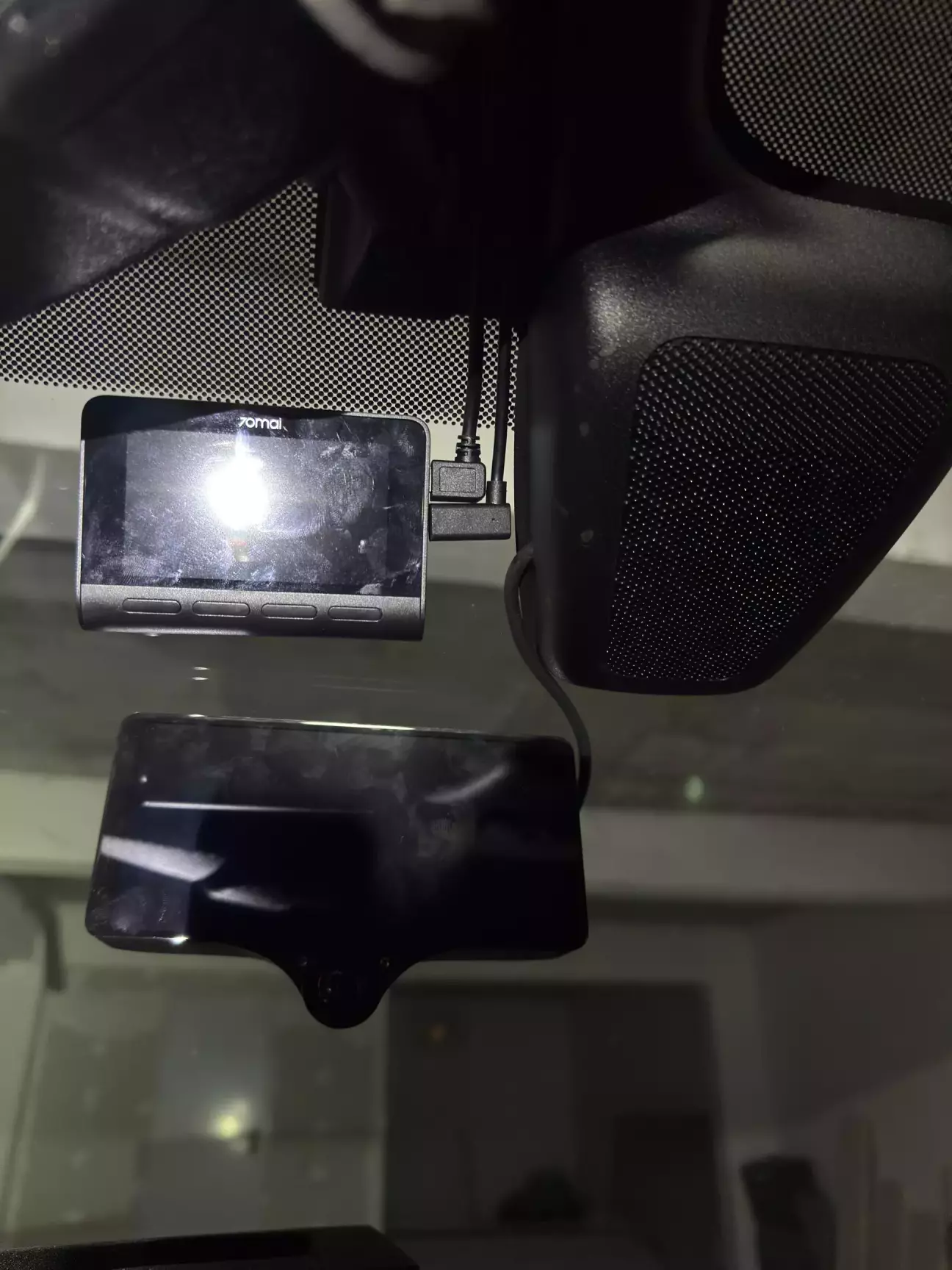
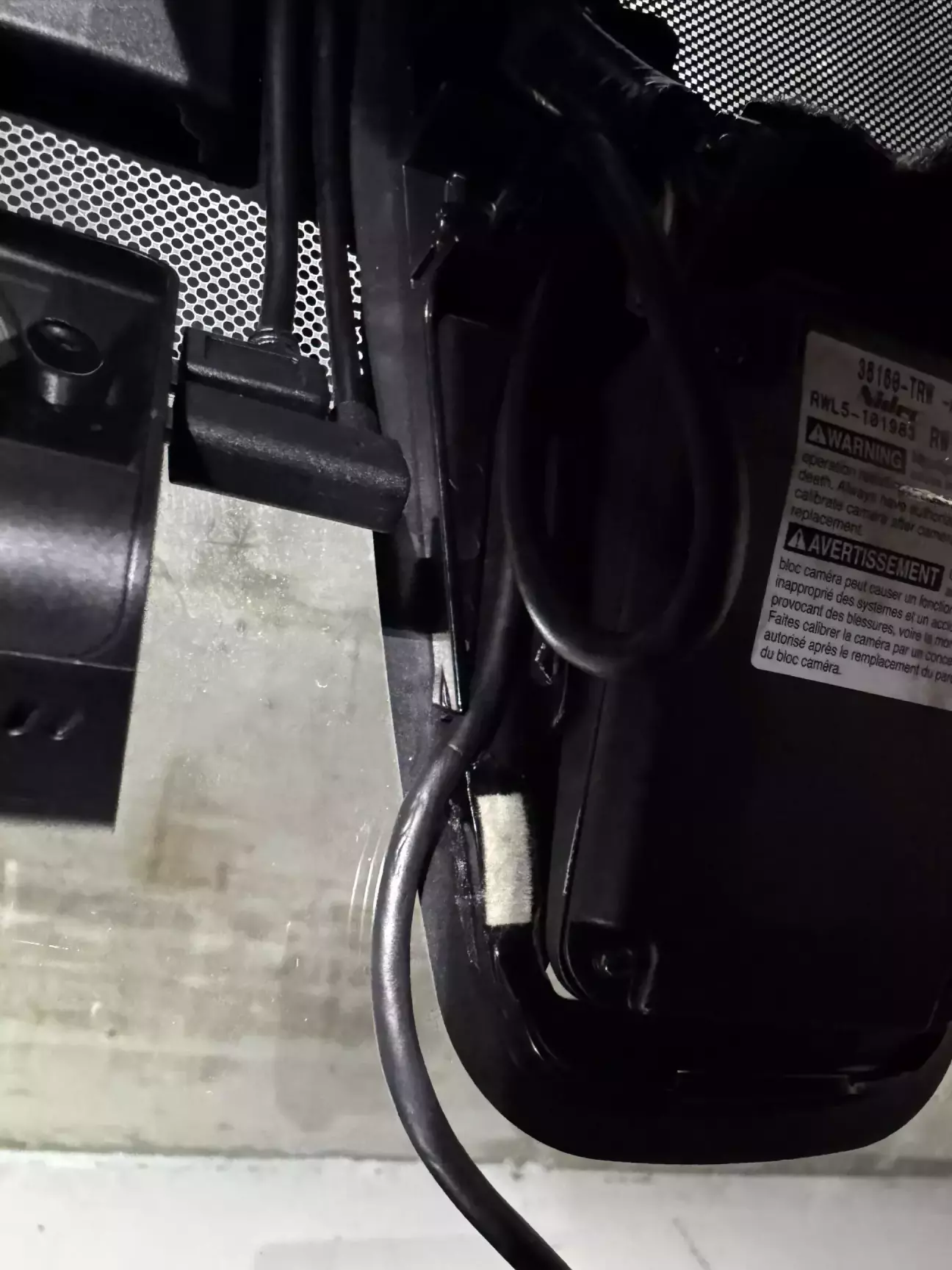
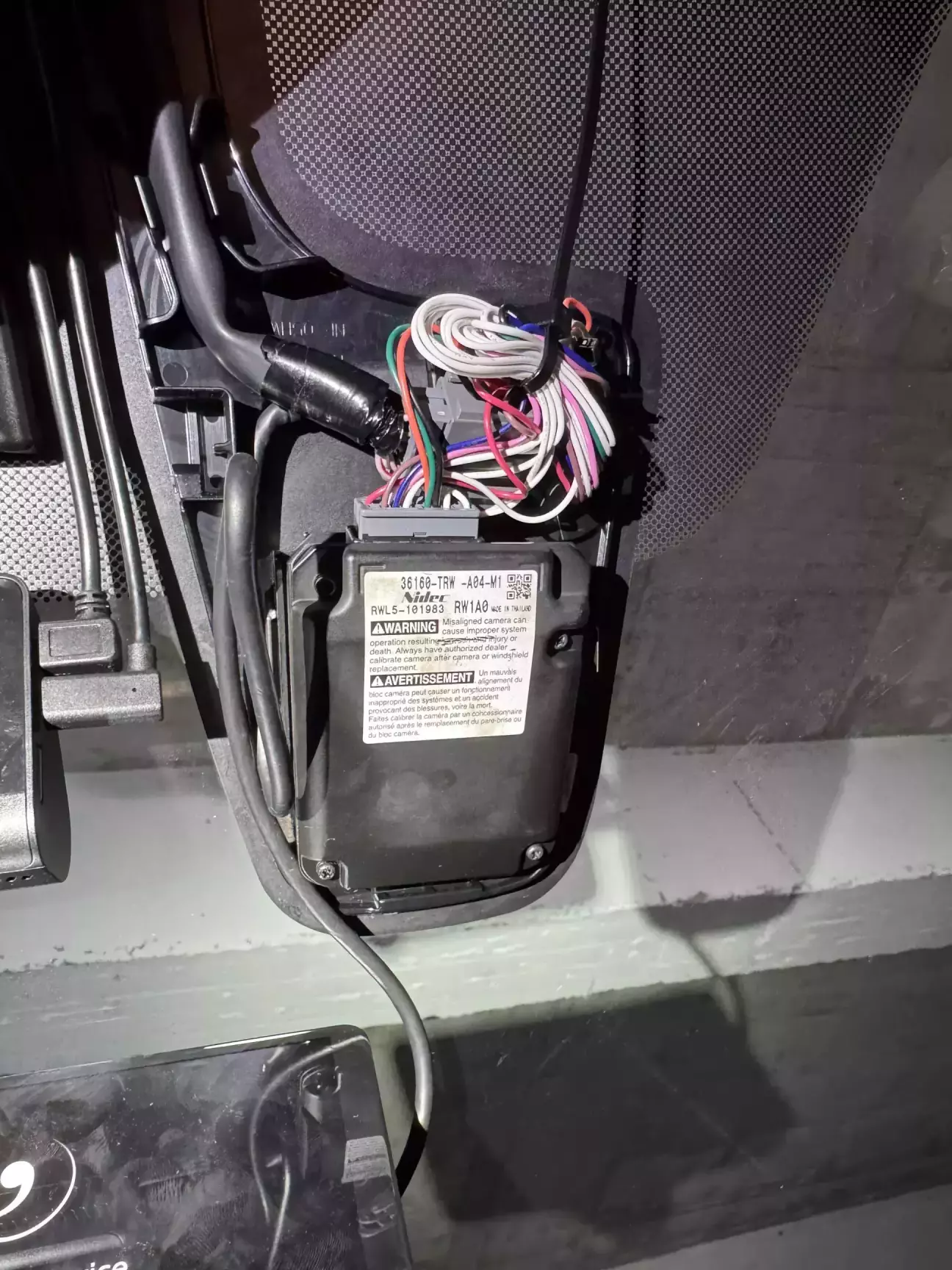
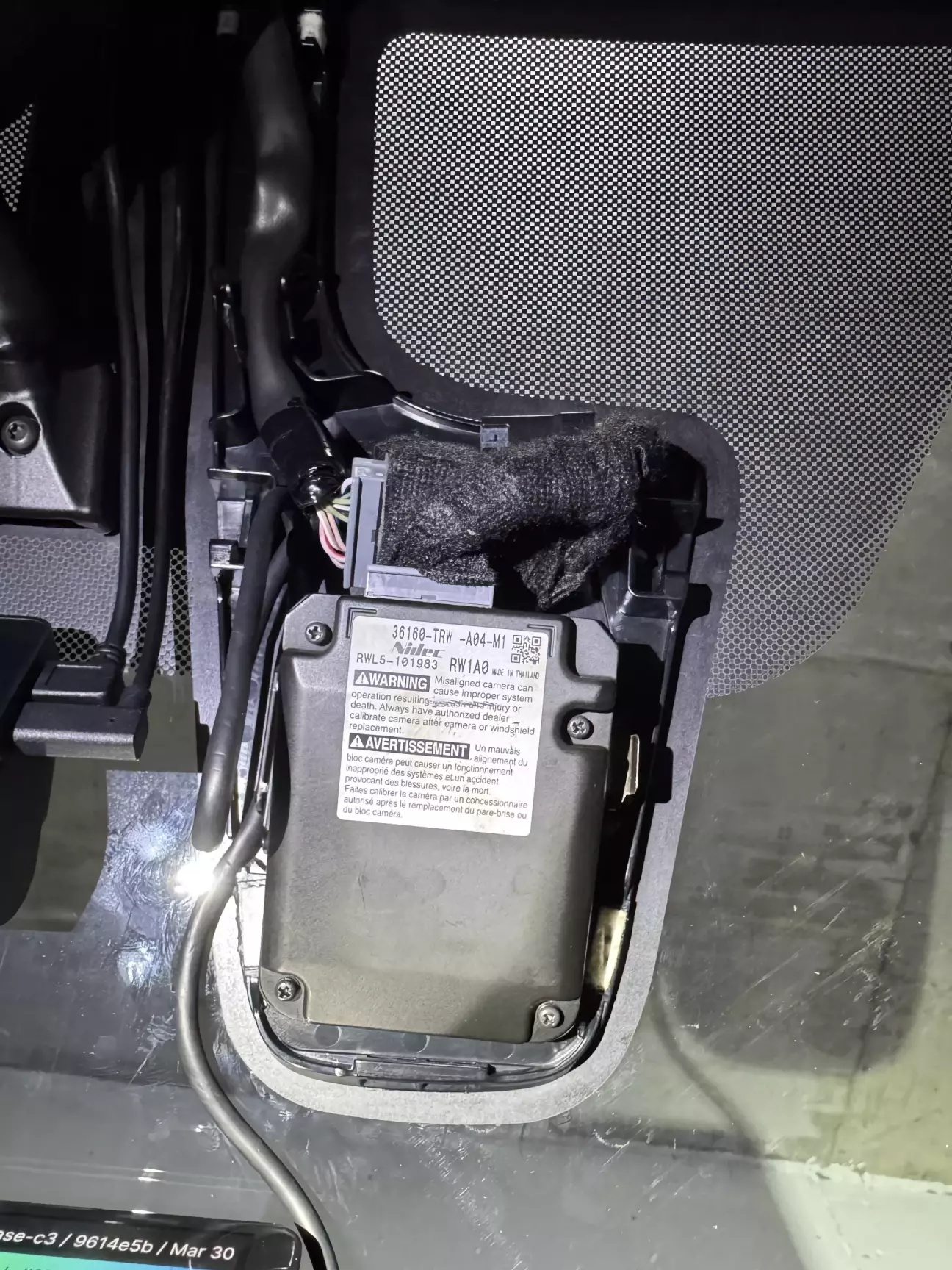
Покупка виявилась складною, все довелось замовляти з США, возитись з розмитненням. А от встановлення достатньо просте зайняло ну може годину. Достатньо поставити Proxy Board в розрив CAN шлюзу (коробочка за магнітолою) та підключити проводку в розрив камери, до якої підключаєтсья маленька коробочка Harness Box яка відповідає за підключення-відключення CAN ліній при відʼєднанні-приєднані компьютера автопілота та конвертує фізичний інтерфейс в OBD-C - інкапсуляція OBD сигналів в Type-C інтерфейс.
Я думав що отримаю просто трохи більш просунутий круїз і утримання смуги, але я отримав більше. Тут викладу плюси порівняно зі стоком чи з моїм про нього уявленням.
1. По-перше, по місту теж працює - по місту утримання смуги працює завжди коли ввімкнений круїз! Навіть тоді, коли підтримання швидкості відключено, ти можеш просто їхати по місту, кидаєш кермо, вона їде прямо зі збереженням полоси, я не знаю як сток працює, але я думаю, що не так, вона ніколи не просить просто по часу братись за кермо, ТІЛЬКИ у випадках різких маневрів.
2. Плюс вона сама змінює полоси, показуєш поворот і трохи штовхаєш кермо, вона розуміє, що ти хочеш перестроїтись, сама змінює смугу і ну і їде прямо. Звісно в нас немає датчиків сліпих зон, тому самому треба стежити за оточенням.
3. Що ще є - значить офлайн карти OSM завантажуються і вона знає, де на яких місцях які обмеження: їдеш по містах, по селах, вона сама скидає швидкість, сама набирає швидкість, у тебе стоїть, наприклад, обмеження на круїзі 100 (на приборці де автівка намальована), але ця штука розуміє, що ти заїжджаєш в місто і сама скидає швидкість, навіть якщо попереду машин немає.
4. Більш просунута чутливість відстані до далеких машин, тобто вона не летить до талого в дупу поки вже не спрацюють радар і треба відторможуватисью. Я не знаю як далеко але вона реально бачить машину і вона реально пригальмовує заздалегідь.
5. У заторах немає цього месаджу "Stopped" і треба штовхати + чи газом - стій скільки хочеш в заторі, вона сама стоїть, сама від'їжджає, якщо попереду машина від'їхала, тобто немає ніякого тайм-ауту, ну або принаймні я не помітив. В корках нічого не потрібно робити, вона просто їде.
6. Якщо засинаєш - вона це відслідковує, пищіть і гальмує плавно але до повної зупинки і не дає далі користуватись круїзом.
7. Детектить користування телефоном і пищить.
8. Є скидання швидкості відносно картографічних OSM даних чи візуальнних даних - після деякого калібрування вона розуміє що швидкість завелика для цього поворота і скидує, не завжди завчасно але моя поїздка по селах-серпантинах дозволяла майже не клацати швидкостями на круїзі. Тільки підрулювати.
Єдиний великий мінус саме в нашій автівці - що рульова колонка обмежена дуже, ДУЖЕ малим моментом який може робити автоматика і якісь там серпантини, круги чи повороти на 90 градусів вона їхати не буде - просить постійно братися за кермо. Це вирішується патченой прошивкою EPS. Думаю собі зробити. Ще є фішка - Comma Pedal - перехоплювач педалі газа який дозволяє машині швидше розганятись ніж це закладено в стоковий круїз.











Експериментальних опцій поки що нема в тій гілці яку я ставив.
Що до ціни - в них є трейдін або ще є konik.ai та інші клони. Але як на мене вона вартує кожного доллара за той функціонал. Америкоси перші весрії за 2-3 косаря купляли..